ZLTECH 24V-36V 5A DC elektryczny Modbus RS485 bezszczotkowy sterownik silnika dla AGV


















FUNKCJA I UŻYTKOWANIE
1 Tryb regulacji prędkości
Zewnętrzna regulacja prędkości wejściowej: podłącz 2 stałe zaciski zewnętrznego potencjometru odpowiednio do portu GND i portu +5v sterownika.Podłącz koniec regulacji do końca SV, aby użyć zewnętrznego potencjometru (10K ~ 50K) do regulacji prędkości lub za pomocą innych jednostek sterujących (takich jak PLC, mikrokomputer jednoukładowy itd.) Wprowadź napięcie analogowe do końca SV, aby zrealizować regulację prędkości (względem GND).Akceptowalny zakres napięcia portu SV wynosi od DC OV do +5 V, a odpowiednia prędkość silnika wynosi od 0 do prędkości znamionowej.
2 Sterowanie uruchomieniem/zatrzymaniem silnika (EN)
Uruchamianie i zatrzymywanie silnika można kontrolować poprzez sterowanie włączaniem i wyłączaniem zacisku EN względem GND.Gdy zacisk jest przewodzący, silnik będzie pracował;w przeciwnym razie silnik zatrzyma się.Podczas używania zacisku pracy/zatrzymania do zatrzymania silnika, silnik zatrzyma się w sposób naturalny, a jego prawo ruchu jest związane z bezwładnością obciążenia.
3 Sterowanie pracą silnika do przodu/do tyłu (F/R)
Kierunek pracy silnika można kontrolować, sterując włączaniem/wyłączaniem zacisku F/R i zacisku GND.Gdy F/R i zacisk GND nie przewodzą prądu, silnik będzie obracał się zgodnie z ruchem wskazówek zegara (od strony wału silnika), w przeciwnym razie silnik będzie obracał się w kierunku przeciwnym do ruchu wskazówek zegara.
4 Awaria sterownika
Gdy wewnątrz sterownika wystąpi przepięcie lub przetężenie, sterownik przejdzie w stan ochrony i automatycznie przestanie działać, silnik zatrzyma się, a niebieskie światło na sterowniku zgaśnie.Sterownik zwolni alarm, gdy zacisk włączający zostanie zresetowany (tj. EN jest odłączony od GND) lub zasilanie zostanie wyłączone.W przypadku wystąpienia tego błędu należy sprawdzić połączenie przewodów z silnikiem lub obciążeniem silnika.
5 Port komunikacyjny RS485
Tryb komunikacji sterownika przyjmuje standardowy protokół Modbus, który jest zgodny z normą krajową GB/T 19582.1-2008.Wykorzystując 2-przewodową komunikację szeregową opartą na RS485, fizyczny interfejs wykorzystuje konwencjonalny 3-pinowy port okablowania (A+, GND, B-), a połączenie szeregowe jest bardzo wygodne.
Parametry
| Kierowca | ZLDBL4005S |
| Napięcie wejściowe (V) | 24V-36V prądu stałego |
| Prąd wyjściowy (A) | 5 |
| Metoda kontroli | Modbus RS485 |
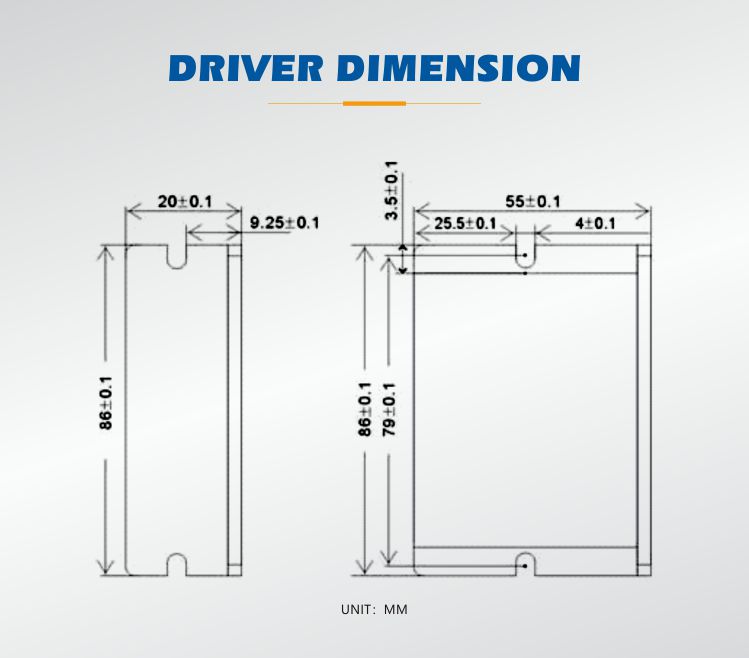
| Wymiar (mm) | 86*55*20mm |
| Waga (kg) | 0,1 |
Wymiar
Podanie

Uszczelka

Urządzenie do produkcji i kontroli

Kwalifikacja i certyfikacja

Biuro i fabryka

Współpraca

Kategorie produktów
-

2S86 ZLTECH 86 seria DC 36V 48V AC 27V-75V kl...
-

ZLTECH 24V-48V 30A Canbus Modbus podwójny kanał D...
-

ZLTECH 15-calowy bezszczotkowy silnik piasty 200 kg DC z ...
-

ZLTECH Nema17 0.5/0.7Nm 18V-36V zintegrowany krok...
-

ZLAC8030L ZLTECH 20V-60V 60A CANOPEN RS485 DC s...
-

ZLTECH 57mm zintegrowany silnik krokowy Nema23 z d...





